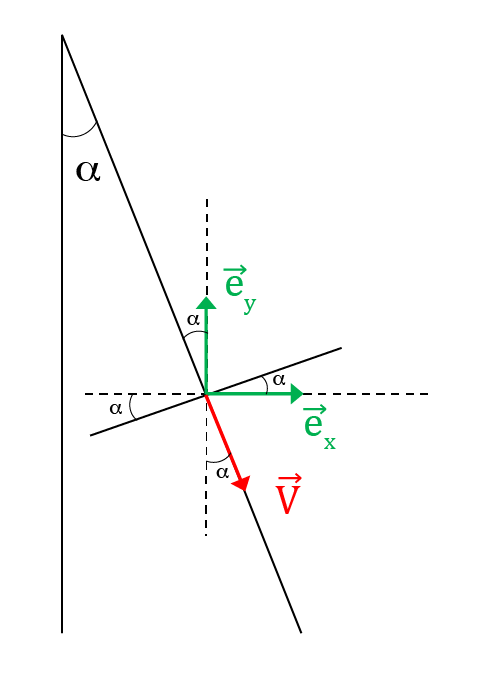
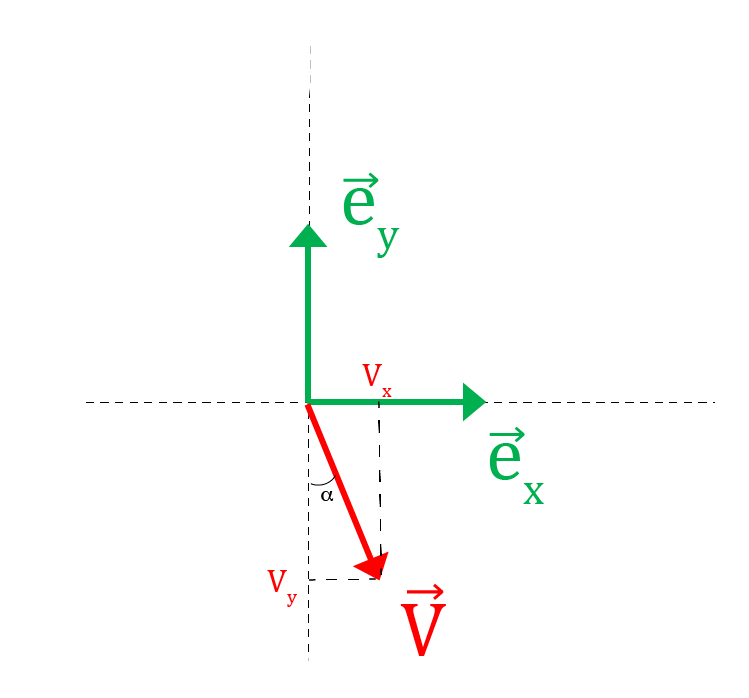
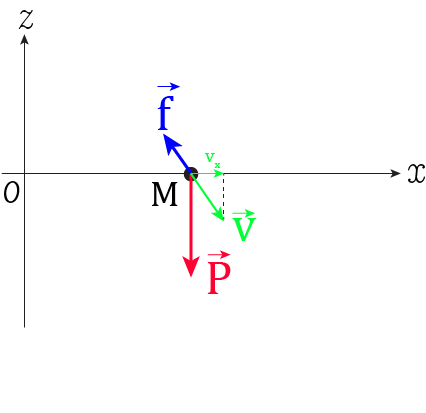
Fig. 39 Projection de \(\vec{V}\) sur \((\vec{e}_x,\vec{e}_y)\).
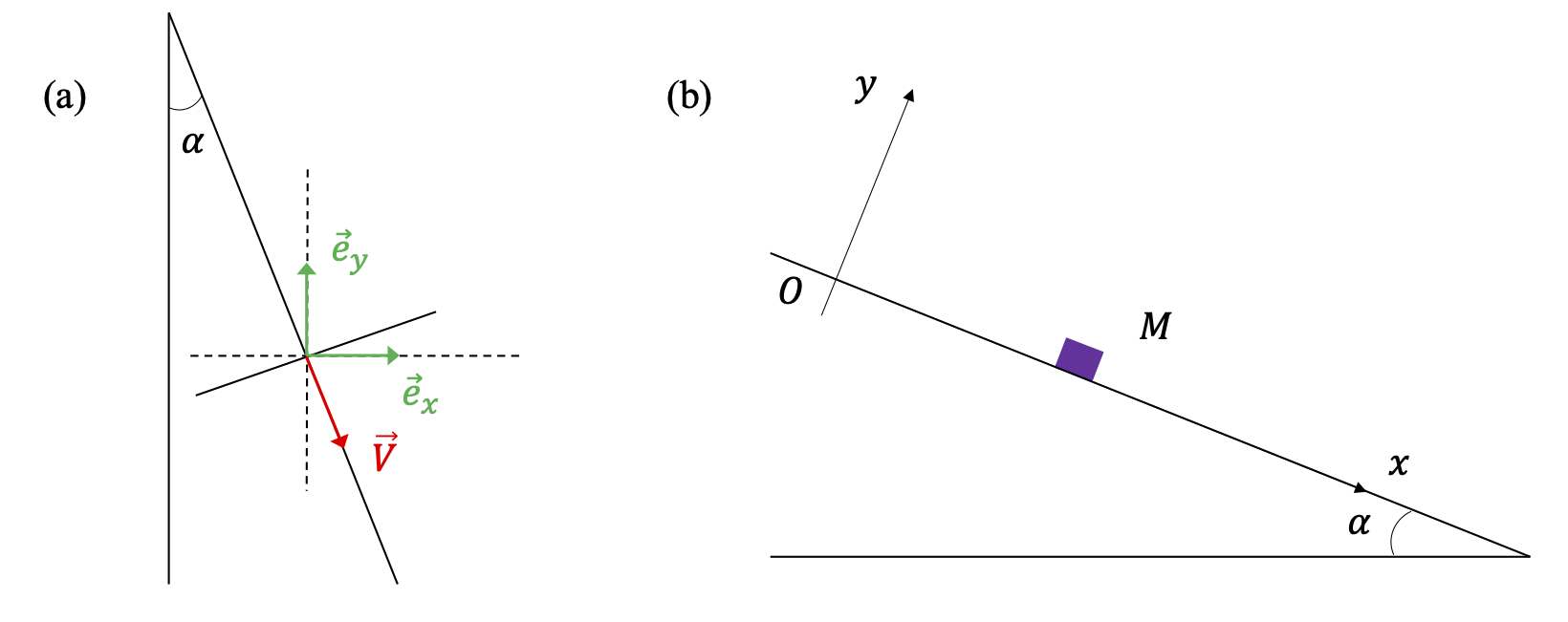
Fig. 40 Gauche: (a) Projection d’un vecteur. Droite: (b) Mouvement en présence de frottement solide.
4.2 Mouvement d’un skieur (\(\ast\ast\) - 20~30 min)
On étudie l’effet du frottement solide sur le mouvement d’un skieur,
que l’on modélise par un point matériel \(M\) qui se déplace le long d’un plan incliné. On se place
dans le repère cartésien \(Oxy\) représenté sur la
Fig. 40 (b). On note \(m\) la masse du point
matériel, \(\mu\) le coefficient de frottement solide, et
\(\alpha\) l’angle du support avec l’horizontale. On néglige les forces de frottement fluide.
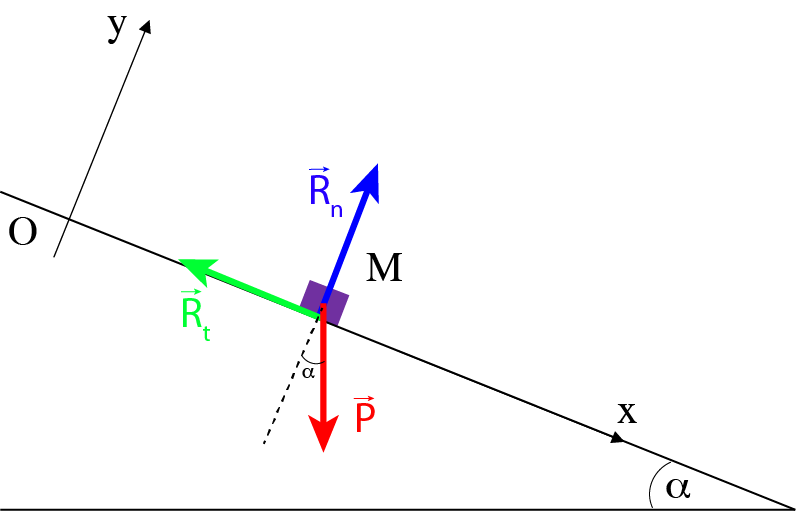
Faire le bilan des forces et les représenter sur le schéma.
Déterminer les composantes des forces dans le repère \(Oxy\).
Rappeler la loi de Coulomb.
En appliquant le principe fondamental de la dynamique, montrer que l’on obtient l’équation suivante selon la direction \((Ox)\) :
Le coefficient de frottement vaut \(\mu=0.15\). Sans résoudre l’équation précédente, déterminer la nature du mouvement pour \(\alpha = 5^{\circ}\) ; pour \(\alpha = 8.53^{\circ}\) ; pour \(\alpha = 11^{\circ}\).
Nous avons trois forces: le poids, la force de réaction du support et la force de frottement sur le support. Elles sont orientées comme indiquées sur le schéma.
\[\sum m \vec{F}_{\textrm{ext}} = m \vec{a} = \vec{P} + \vec{R}_t + \vec{R}_n\]
En projetant sur chacun des axes on otbient:
Sur Ox: \(-R_t + m g \sin{\alpha} = m a_x = m \parderder{x}{t}\)
Sur Oy: \(R_n - m g \cos{\alpha} = m a_y = 0\) car le mobile ne se déplace pas dans la direction Oy
Sur Oz: \(0 = m a_z = 0\) car le mobile ne se déplace pas dans la direction Oz
À partir de la projection sur Oy on peut donc écrire que: \(R_n = m g \cos{\alpha}\) et donc en utilisant la loi de Coulomb on déduit: \(R_t = \mu R_n = \mu m g \cos{\alpha}\).
On reporte dans la projection sur Ox et on obtient:
\[\begin{split}-R_t + m g \sin{\alpha} = - \mu m g \cos{\alpha} + m g \sin{\alpha} = m \parderder{x}{t} \\
\Leftrightarrow g (- \mu \cos{\alpha} + \sin{\alpha}) = \parderder{x}{t} \\
\Leftrightarrow g \cos{\alpha} (-\mu + \frac{\sin{\alpha}}{\cos{\alpha}}) = \parderder{x}{t} \\
\Leftrightarrow \boxed{g \cos{\alpha} (\tan{\alpha} - \mu) = \parderder{x}{t} }\end{split}\]
On voit que le signe de l’accélération \(\parderder{x}{t}\) dépend uniquement du signe du terme \((\tan{\alpha}-1)\), puisque g>0 et \(\cos{\alpha}>0\).
Pour un angle de 5˚, on aura \(\tan{\alpha}-0.15<0\) et le mouvement sera freiné. Ce sont les frottements qui dominent.
Pour un angle de 8.53˚, on aura \(\tan{\alpha}-0.15=0\) et le mouvement sera de vitesse constante. Il y a équilibre entre les frottements (qui freinent) et le poids (qui accélère).
Pour un angle de 11˚, on aura \(\tan{\alpha}-0.15>0\) et le mouvement sera accéléré. C’est le poids qui domine sur les frottements.
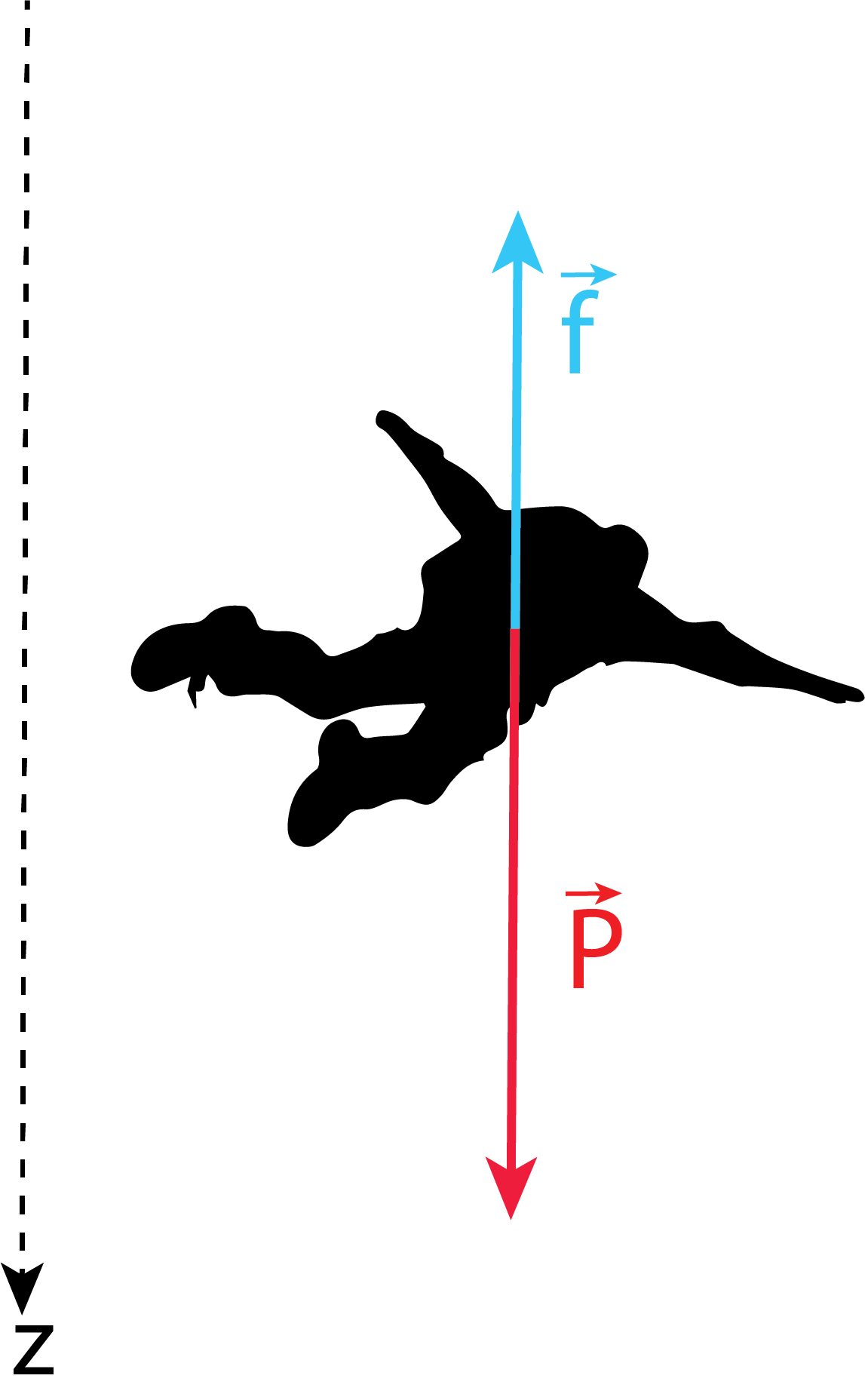
4.3 Saut en chute libre (\(\ast\ast\) - 20~25min)
On étudie le mouvement d’un parachutisme de masse \(m\) en chute
libre dans l’air. La résistance de l’air est modélisée par une force de
frottement \(\vec{f}\) de norme
\(\Vert \vec{f} \Vert = \frac{1}{2} C_x \rho Sv^2\), où \(\rho\)
est la masse volumique de l’air, \(C_x\) le coefficient de traînée,
et \(S\) la surface projetée (\(S=\pi a^2\) pour une sphère par
exemple). On suppose que le parachutiste saute sans vitesse initiale. On
se place dans un repère cartésien dont l’axe vertical\((Oz)\)est
orienté vers le bas.
Définir le système et faire le bilan des forces.
Faire un schéma représentant le repère et les forces, dont on précisera les composantes.
En appliquant le principe fondamental de la dynamique, montrer que la composante selon \(z\) de la vitesse vérifie l’équation :
\[\frac{d v_z}{d t} = \alpha - \beta v_z^2 \ ,\]
où \(\alpha\) et \(\beta\) sont deux constantes que l’on
déterminera en fonction des données de l’énoncé.
À l’issue d’un régime transitoire, le parachutiste atteint la vitesse stationnaire \(v_{\infty}\). Déterminer l’expression de \(v_{\infty}\) en fonction de \(\alpha\) et \(\beta\).
Faire l’application numérique pour \(m=70\) kg,
\(g=9,8~\text{m}\cdot \text{s}^{-2}\),
\(\rho=1,3~\text{kg}\cdot \text{m}^{-3}\), et \(C_x=1\). On
proposera une estimation de \(S\) selon que le parachutiste soit
en position verticale ou horizontale.
Fig. 42 Formation de parachutistes pratiquant la chute libre.
Solution
Question 1:
Le système est constitué par le parachustiste, que l’on assimile à un poibnt matériel..
Les forces suivantes s’appliquent au parachustiste:
le poids \(\vec{P}=m\vec{g}\)
les forces de frottement dans l’air, de norme: \(f=\frac{1}{2}C_x \rho S v^2\)
on néglige la poussée d’Archimède
Question 2
Afin de simplifier la discussion, l’axe\((Oz)\)est orienté vers le bas.
On projette alors l’équation (57) sur l’axe Oz pour obtenir :
\[\begin{split}m \parder{v_z}{t}= m g - \frac{1}{2}C_x \rho S v_z^2 \\
\Leftrightarrow \parder{v_z}{t}= g - \frac{1}{2m}C_x \rho S v_z^2 \\\end{split}\]
Physiquement, le mouvement du parachustiste est d’abord accéléré lors du régime transitoire avant d’atteindre une vitesse constante en régime stationnaire. Si on s’intéresse uniquement à cette vitesse limite, il n’est pas nécessaire de résoudre l’équation précédente. En effet, le régime stationnaire correspond à la limite:
Autrement dit, la vitesse limite est atteinte lorsque le poids et la force de frottement se compensent. On a donc:
\[\parder{v_\infty}{t}= 0 = \alpha - \beta v_\infty^2
\Leftrightarrow v^\infty = \sqrt{\frac{\alpha}{\beta}} = \sqrt{\frac{2 g m}{C_x \rho S }}\]
Question 5
A.N.: Pour l’application numérique, on considère une personne qui mesure 1.8m. On assimile la section de cette personne à l’horizontal à un rectangle de 0.5m de largeur, et à la verticale à un rectangle de \(0.5m\times0.2m\)
À l’horizontal: \(v_\infty = \sqrt{\frac{2 \times 9.81 \times 70}{1 \times 1.3 \times 1.8 \times 0.5}} = 34\) m/s
À la verticale: \(v_\infty = \sqrt{\frac{2 \times 9.81 \times 70}{1 \times 1.3 \times 0.5 \times 0.2}} = 103\) m/s
Note
Considérer que \(C_x\) est identique dans les deux cas est une appromation discutable, puisqu’il dépend de la forme de l’objet.
Record de vitesse en chute libre
Le record de vitesse en chute libre est détenu par Felix Baumgartner qui a sauté depuis l’altitude de 39km depuis un ballon stratisphérique.
Il a atteint la vitesse de 1342.8 km/h.
4.4 Mouvement balistique en présence de frottement visqueux (\(\ast\ast\) - 15~20min)
Un projectile de masse \(m\) est lancé depuis le bord d’une falaise
avec une vitesse initiale horizontale : \(\vec{v}_0=v_0 \vec{e}_x\).
Le mouvement se déroule dans le plan \(Oxz\), l’axe vertical
\(Oz\) étant orienté vers le haut. Le projectile, assimilé à un
point matériel, est soumis à la force de frottement fluide
\(\vec{f}=-k \vec{v}\), où \(k\) est une constante.
En appliquant le principe fondamental de la dynamique, établir l’équation vérifiée par la composante \(v_x\) de la vitesse. Montrer qu’elle peut se mettre sous la forme :
où \(\tau\) est une constante dont on déterminera la dimension.
On cherche une solution de la forme : \(v_x(t)= K e^{-\beta t}\). Injecter cette solution dans l’équation pour déterminer l’expression du paramètre \(\beta\).
À partir des conditions initiales, relier également la constante \(K\) aux données du problème.
Déterminer l’expression de la position \(x(t)\). Montrer qu’elle tend vers une valeur finie \(x_{\infty}\) lorsque \(t\to + \infty\). Tracer la courbe représentative de la fonction \(x(t)\).
Solution
Question 1:
Le système est constitué par le projectile
Les forces suivantes s’appliquent au système:
le poids \(\vec{P}=m\vec{g} = \begin{pmatrix}0 \\ 0 \\ -m g \end{pmatrix}\)
les forces de frottement dans l’air, de norme: \(\vec{f}=-k \vec{v} = \begin{pmatrix} -k v_x \\ 0 \\ -k v_z\end{pmatrix}\)