On considère le mouvement unidimensionnel décrit par :
\(x(t) = x_0 e^{-\alpha t}\) pour \(t \geq 0\), où \(x_0\)
et \(\alpha\) sont deux constantes positives.
Quelle est la dimension du paramètre \(x_0\) ? Du paramètre \(\alpha\) ?
Calculer la vitesse \(v(t)\). Vérifier la dimension du résultat.
Déterminer également l’accélération \(a(t)\).
Tracer la courbe représentative de la fonction \(x(t)\), sur
laquelle on fera figurer le paramètre \(\alpha\).
Solution
Question 1.
Le paramètre \(x_0\) doit avoir la même dimension que \(x\), c’est-à-dire une longueur \(L\).
Comme vu en cours, l’argument de la fonction exponentielle doit être sans dimension, donc le paramètre \(\alpha\) doit être homogène à l’inverse d’un temps \(T^{-1}\).
Question 2.
La vitesse est donnée par la dérivée de la position en fonction du temps. On a ici une fonction composée:
\[\begin{split}\begin{align}
f(u)=x_0 \cdot e^{u}\\
x(t)=-\alpha t
\end{align}\end{split}\]
La dérivée d’une fonction composée d’obtient par: \(\frac{df(u)}{dt}=\frac{df}{du} \cdot \frac{du}{dt}\). Ici nous avons:
ou \(\alpha,\beta\) et \(\omega\) sont des constantes positives
Quelles sont les dimensions des paramètres α, β et ω ?
Déterminer les composantes du vecteur vitesse \(\vec{v}(t)\).
Procéder de même pour le vecteur accélération \(\vec{a}(t)\).
Montrer que la norme de ces deux vecteurs est constante. On rappelle que : cos² x + sin² x = 1.
Calculer le produit scalaire \(\vec{v} \cdot \vec{a}\). En déduire que \(\vec{v}\) et \(\vec{a}\) sont orthogonaux.
Solution
Question 1.
L’argument d’une fonction mathématique doit être sans dimension. Donc l’argument des fonctions sinus et cosinus \([\omega t]\) n’a pas de dimension. Or, comme \([t]=T\), il faut donc que \([\omega]=T^{-1}\) pour que \([\omega t]\) n’ait pas de dimension.
x, y et z dont des positions, et donc leur dimension est homogène à une longueur L.
Comme les fonctions sinus et cosinus n’ont pas de dimension, on déduit que [α] est homogène à une longueur L.
Pour que [β t] soit homogène à une longueur, il faut que \([\beta t] = [\beta] T = L\), et donc que \([\beta]= L T^{-1}\).
On sait que \(\vec{v}\neq 0\) et que \(\vec{a}\neq 0\), donc la seule possibilté pour que \(\vec{v} \cdot \vec{a}=0\) est que \(\cos(\widehat{\vec{v},\vec{a}})=0\). Pour que le cosinus d’un angle soit égal à zéro il faut que cet angle soit égal à \(\frac{\pi}{2}=90^{\circ}\), donc les 2 vecteurs doivent être perpendiculaires.
Dans le film « Retour vers le futur » de R. Zemeckis (1985), le héros
Marty McFly doit atteindre au volant de sa DeLorean la vitesse
\(v_0=88\) mph à l’instant précis où la foudre s’abat sur l’horloge
de l’hôtel de ville. On note \(x(t)\) et \(v(t)\) respectivement
la position et la vitesse du véhicule à l’instant \(t\), avec les
conditions initiales \(x(0)=0\) et \(v(0)=0\). On suppose que le
mouvement est rectiligne et uniformément accéléré : \(a(t)=a_0>0\).
La distance qui sépare la position initiale de l’hôtel de ville est
\(d=1~\text{mile} \ (\simeq 1609~\text{m})\).
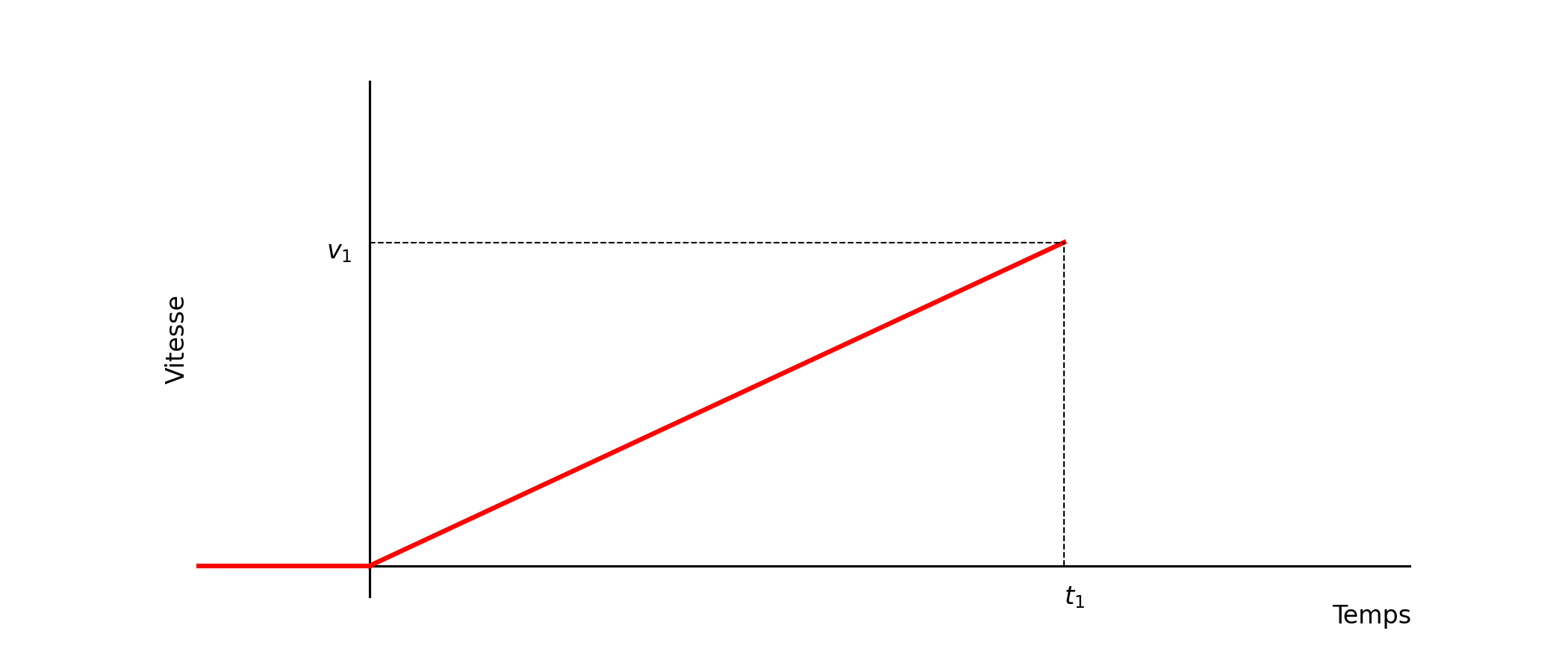
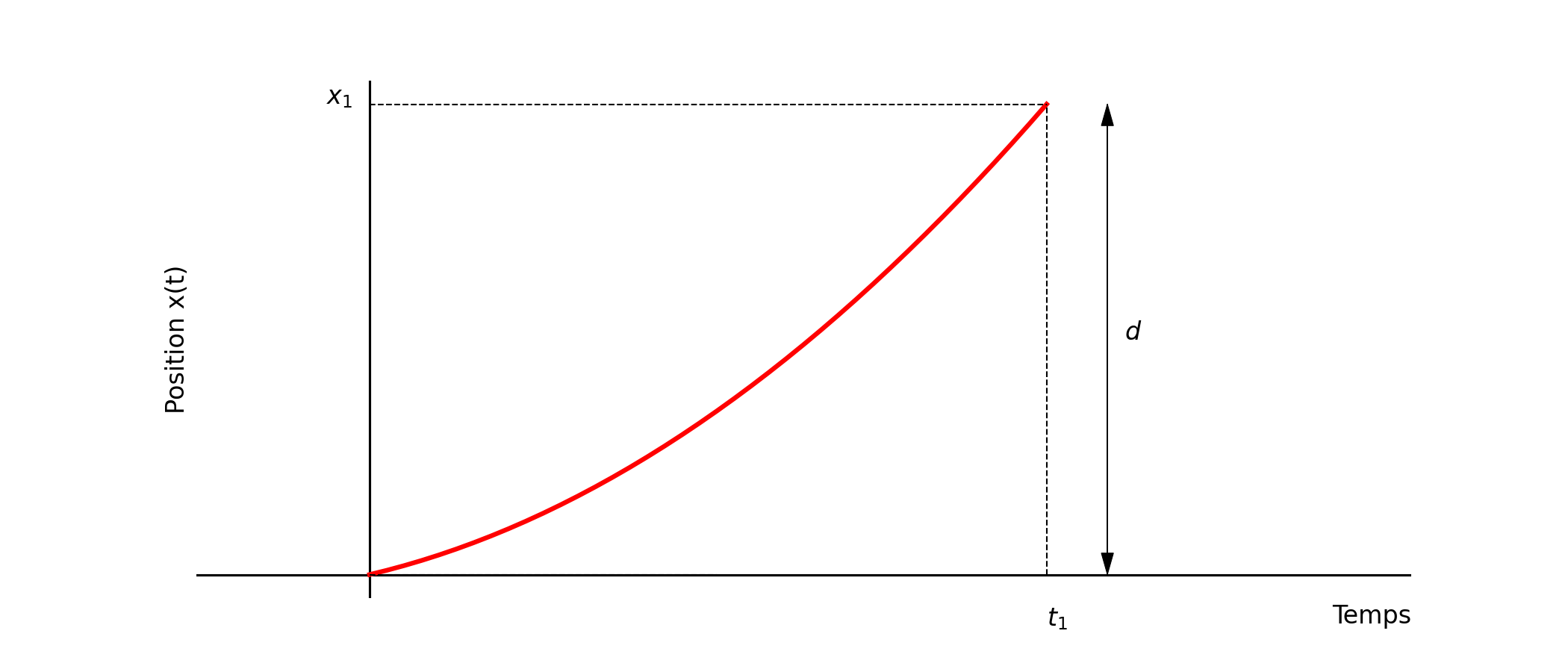
Tracer graphiquement l’évolution de la vitesse, puis de la position, en fonction du temps.
Déterminer l’expression de \(v(t)\) pour \(t\geq 0\).
On note \(\tau\) l’instant où la voiture atteint la vitesse \(v_0\). Exprimer \(\tau\) en fonction de \(v_0\) et \(a_0\).
Déterminer également l’expression de \(x(t)\) pour \(t\geq 0\).
Étant donné que \(x(\tau)=d\), établir une relation entre \(a_0\), \(v_0\) et \(d\). En déduire que : \(\tau = 2d/v_0\)
La foudre frappe l’horloge précisément à 22h 04mn 00s. Déterminer, à la seconde près, l’heure à laquelle Marty doit démarrer.
Solution
Question 1.
Jusqu’à \(t=0\), la vitesse est nulle (la voiture n’a pas démarré). À partir de \(t\ge0\) la vitesse augmente de manière constante, on a donc une droite de pente \(a_0\).
Jusqu’à \(t=0\), la voiture est à sa position initiale en \(x=0\). À partir de \(t\ge0\) la vitesse augmente de manière constante et donc la position augmente de plus en plus rapidement.