2. Cinématique du point
La cinématique a pour objet l’étude des mouvements, indépendamment des causes qui les produisent. Dans ce chapitre, nous définissons les notions de vitesse et d’accélération dont nous aurons besoin pour caractériser les trajectoires. Nous introduisons également les notions mathématiques qui nous seront indispensables tout au long de ce cours.
Géométrie dans l’espace
En physique, on peut distinguer deux types de grandeurs : les scalaires, qui sont spécifiés par un nombre et éventuellement une unité, et les vecteurs, caractérisés par une direction, un sens et une norme. La norme étant elle-même un scalaire, elle peut également avoir une dimension. Nous commençons par rappeler quelques propriétés des vecteurs.
Définition
Un vecteur est un segment orienté, ayant pour extrémités un point de départ et un point d’arrivée, que l’on note respectivement \(A\) et \(B\) pour fixer les idées. Le vecteur \(\overrightarrow{AB}\) ainsi formé est défini par :
sa direction, la droite \((AB)\).
son sens, du point \(A\) vers le point \(B\).
sa norme, qui correspond à la longueur du segment \([AB]\).
Une propriété importante en calcul vectoriel est la relation de Chasles : \(\overrightarrow{AB}+\overrightarrow{BC}=\overrightarrow{AC}\).
Coordonnées cartésiennes
Pour repérer la position d’un point dans l’espace, on définit le repère cartésien \(Oxyz\) constitué d’une origine \(O\) et de trois vecteurs \(\vec{e}_x\), \(\vec{e}_y\) et \(\vec{e}_z\) qui sont tels tels que :
les vecteurs sont unitaires : \(\Vert \vec{e}_x\Vert =\Vert \vec{e}_y \Vert = \Vert \vec{e}_z \Vert = 1\).
ils sont orthogonaux deux à deux.
ils forment un trièdre direct.
Cette dernière condition permet de définir une orientation de l’espace.
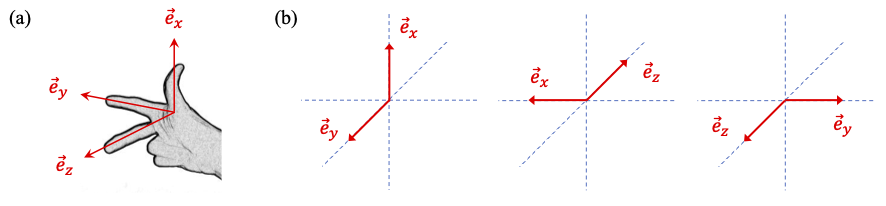
Fig. 5 Gauche (a) Illustration de la règle des trois doigts (de la main droite). Droite (b) Trièdres incomplets.
En physique, il est essentiel de savoir construire une base directe. Pour cela, on applique la « règle des trois doigts » illustrée sur la Fig. 5 (a) : le pouce (de la main droite) donne le sens de \(\vec{e}_x\), l’index celui de \(\vec{e}_y\), et le majeur celui de \(\vec{e}_z\). Une autre méthode consiste à utiliser la « règle de l’observateur » proposée par Ampère au cours de ses travaux sur le magnétisme. L’observateur est debout et traversé des pieds à la tête par le vecteur \(\vec{e}_x\). Il regarde dans le sens du vecteur \(\vec{e}_y\). En tendant le bras gauche, il indique alors le sens du vecteur \(\vec{e}_z\).
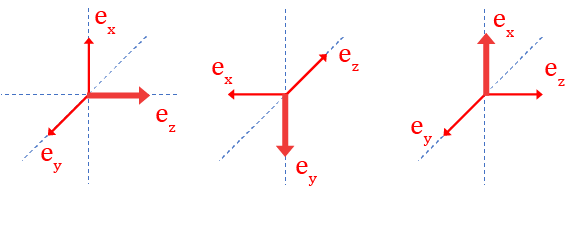
Application 2.1: Compléter les trièdres de la Fig. 5 (b) de telle sorte que les bases \((\vec{e}_x,\vec{e}_y,\vec{e}_z)\) soient directes.
Dans un repère cartésien, la position d’un point \(M\) est repérée par ses coordonnées \((x,y,z)\) qui correspondent aux projections orthogonales de \(M\) sur les axes \((Ox)\), \((Oy)\) et \((Oz)\) — voir la Fig. 6 (a). De façon équivalente, le vecteur \(\overrightarrow{OM}\) peut s’écrire :
Plus généralement, si deux points \(A\) et \(B\) ont pour coordonnées \(A(x_A,y_A,z_A)\) et \(B(x_B,y_B,z_B)\), alors le vecteur \(\overrightarrow{AB}\) a pour composantes :

Fig. 6 Gauche: (a) Définition des coordonnées d’un point \(M\) dans la base cartésienne. Droite: (b) Produit scalaire entre deux vecteurs.
Produit scalaire et norme
Dans un repère cartésien, la norme du vecteur \(\vec{u} = u_x \vec{e}_x + u_y \vec{e}_y + u_z \vec{e}_z\) est donnée par :
On définit également le produit scalaire entre \(\vec{u}\) et le vecteur \(\vec{v} = v_x \vec{e}_x + v_y \vec{e}_y + v_z \vec{e}_z\):
Le produit scalaire vérifie les propriétés suivantes :
D’un point de vue géométrique, le produit scalaire est relié à l’angle \(\theta\) entre les vecteurs. Choisissons un repère tel que que les deux vecteurs \(\vec{u}\) et \(\vec{v}\) soient dans le plan \(Oxy\), comme représenté sur la Fig. 6 (b). Pour simplifier, on choisit l’axe \((Ox)\) colinéaire au vecteur \(\vec{u}\). Dans ce cas, on a \(v_x=~ \Vert \vec{v} \Vert \times \cos \theta\), et donc finalement :
Dans le cas particulier où \(\vec{u}=\vec{e}_x\), l’équation (3) permet encore d’écrire : \(\vec{v}\cdot\overrightarrow{e_x}=v_x\). Ce résultat peut se généraliser à 3 dimensions : on retiendra alors que les coordonnées d’un vecteur s’obtiennent par projection sur les vecteurs de base :
Vitesse et accélération
Revenons maintenant à la physique et concentrons-nous sur la description des mouvements. La trajectoire d’un point \(M\) est définie comme l’ensemble des positions occupées par ce point au cours du temps. Nous discutons d’abord le cas des mouvements unidimensionnels, avant de généraliser les notions de vitesse et d’accélération à un mouvement quelconque.
Mouvement unidimensionnel
Considérons le mouvement rectiligne d’un point \(M\) le long d’une droite, l’axe \((Ox)\) pour fixer les idées. La position de \(M\) à un instant \(t\) est décrite par son abscisse \(x(t)\), qui est donc une fonction de la variable \(t\). Pour caractériser les variations de position au cours du temps, on introduit la notion de vitesse :
La vitesse du point \(M\) à l’instant \(t\) est égale à la dérivée de la position par rapport au temps :
(4)\[v(t) = \frac{d x}{d t} \ .\]Dimension : \([v] = [dx]/[dt]=L\cdot T^{-1}\). Unité : \(\text{m}\cdot\text{s}^{-1}\).
La vitesse étant elle-même une fonction du temps, on définit la notion d’accélération.
Définition
L’accélération du point \(M\) à l’instant \(t\) est égale à la dérivée de la vitesse par rapport au temps :
Dimension : \([a] = [dv]/[dt]=L \cdot T^{-2}\). Unité : \(\text{m}\cdot\text{s}^{-2}\).
L’accélération peut prendre des valeurs aussi bien positives que négatives : elle est positive en phase d’accélération (lorsque la vitesse augmente), et négative en phase de décélération (lorsque la vitesse diminue). Si la vitesse est constante, \(a=0\) et le mouvement est rectiligne uniforme. Un mouvement pour lequel l’accélération est constante est dit uniformément accéléré.
Rappels
Dérivée d’une fonction
Considérons deux points infiniment proches \(t_0\) et \(t_0+ \Delta t\), et notons \(\Delta f = f(t_0+ \Delta t) - f(t_0)\) l’accroissement de la fonction \(f\) — voir la figure ci-contre. On définit alors la dérivée de \(f\) en \(t_0\) comme la limite du taux de variation :

Suivant les disciplines, on rencontre différentes notations pour désigner la dérivée. La notation \(f'(t)\) est utilisée habituellement en mathématiques, alors que la notation différentielle \(\frac{d f}{d t}\) est plus commune en physique. L’intérêt de la seconde notation est qu’elle exprime la dérivée comme le rapport de deux quantités infinitésimales.
Interprétation géométrique
La dérivée d’une fonction \(f\) en un point \(t_0\) correspond à la pente de la tangente de la courbe représentative de la fonction. La tangente a pour équation :
Dérivée des fonctions usuelles
Fonction \(f\) |
Dérivée \(f'\) |
Intervalles de dérivabilité |
|---|---|---|
k (constante) |
0 |
\(\mathbb{R}\) |
\(x\) |
1 |
\(\mathbb{R}\) |
\(a x + b\) |
\(a\) |
\(\mathbb{R}\) |
\(x^n (n \in \mathbb{N})\) |
\(n x^{n-1}\) |
\(\mathbb{R}\) |
\(x^{-n} (n \in \mathbb{N})\) |
\(-n x^{-n-1}\) |
\([-\infty;0[ ]0;+\infty]\) |
\(\cos{x}\) |
\(-\sin{x}\) |
\(\mathbb{R}\) |
\(\sin{x}\) |
\(\cos{x}\) |
\(\mathbb{R}\) |
\(\tan{x}\) |
\(\frac{1}{\cos^2{x}}=1+\tan^2{x}\) |
\(\mathbb{R}\) |
\(e^{x}\) |
\(e^{x}\) |
\(\mathbb{R}\) |
\(\ln{x}\) |
\(\frac{1}{x}\) |
\(]0;+\infty]\) |
\(u(x) \cdot v(x)\) |
\(u' v + u v'\) |
|
\(\frac{u(x)}{v(x)}\) |
\(\frac{u'v-uv'}{v^2}\) |
Dérivée d’une fonction composée
Les fonctions rencontrées en physique sont souvent des fonctions composées : \(\cos \omega t\), \(e^{-\alpha t}\), \(\sqrt{1-t^2}\), … Pour dériver une fonction de la forme \(f\left( u(t) \right)\), on applique la règle suivante [1] :
Par exemple : \(f(t)=\cos \omega t=f(u(t))\), avec \(f(u)=\cos u\) et \(u(t)=\omega t\). On a alors : \(df / du = - \sin u\) et \(d u / dt = \omega\), de telle sorte que : \(df / dt = - \omega \sin \omega t\).
Primitives de la vitesse et de l’accélération
Connaissant la fonction \(v(t)\), on peut remonter à \(x(t)\) par l’opération mathématique inverse de la dérivée : on dira que la position est la primitive de la vitesse. De la même façon, la vitesse est la primitive de l’accélération.
Définition
On appelle primitive de la fonction \(f\) toute fonction \(F\) qui est telle que :
Cette définition implique que la primitive d’une fonction n’est pas unique : si on ajoute n’importe quelle constante \(C\in \mathbb{R}\) à \(F\), alors la fonction obtenue est encore une primitive de \(f\). En effet, on peut écrire : \(d (F(t) + C)/ dt = d F / d t + 0 = f(t)\). Par conséquent, une primitive est toujours définie à une constante près.
Exemples :
\(f_1(t)=t \quad \Rightarrow \quad F_1(t)=\displaystyle{\frac{t^2}{2}}+C_1\)
\(f_2(t)=\sin (2t) \quad \Rightarrow \quad F_2(t)= - \displaystyle{\frac{1}{2}} \cos (2t) + C_2\)
Pour déterminer la valeur de la constante d’intégration, on a besoin d’une condition initiale qui fixe la valeur de la fonction à un instant donné.
Si on reprend les exemples précédents avec les conditions initiales suivantes :
\(F_1(0)= 0 \quad \Rightarrow \quad 0 + C_1 = 0 \quad \Rightarrow \quad C_1= 0\)
\(F_2(0)=0 \quad \Rightarrow \quad -\displaystyle{\frac{1}{2}}+C_2=0 \quad \Rightarrow \quad C_2= \displaystyle{\frac{1}{2}}\)
La table ci-dessous rappelle quelques primitives de fonctions usuelles.
Fonction \(f\) |
Intervalles |
Primitive \(F\) |
|---|---|---|
\(k\) (constante) |
\(\mathbb{R}\) |
\(kx+C\) |
\(x\) |
\(\mathbb{R}\) |
\(\frac{x^2}{2}+C\) |
\(x^n (n \in \mathbb{N}^{*})\) |
\(\mathbb{R}\) |
\(\frac{x^{n+1}}{n+1}+C\) |
\(x^{-n} (n \in \mathbb{N} ; n\ge2)\) |
\([-\infty;0[ ]0;+\infty]\) |
\(-\frac{1}{n-1} x^{1-n} + C\) |
\(\cos{x}\) |
\(\mathbb{R}\) |
\(\sin{x}+C\) |
\(\sin{x}\) |
\(\mathbb{R}\) |
\(-\cos{x}+C\) |
\(\exp{x}\) |
\(\mathbb{R}\) |
\(\exp{x}+C\) |
\(\ln{x}\) |
\(\mathbb{R}^{*}_{+}\) |
\(x\ln{x}-x+C\) |
Généralisation à 3 dimensions
Dans le cas général d’un mouvement dans l’espace, c’est-à-dire à 3 dimensions, la position du point \(M\) à l’instant \(t\) est repérée par le vecteur position \(\overrightarrow{r}(t) = \overrightarrow{OM}(t)\).
Définition
Les vecteurs vitesse \(\vec{v}(t)\) et accélération \(\overrightarrow{a}(t)\) sont définis par :
En coordonnées cartésiennes, nous pouvons donc écrire :
où \(x\), \(y\) et \(z\) sont respectivement l’abscisse, l’ordonnée et l’altitude du point \(M\).
Afin de mieux appréhender ces définitions, arrêtons-nous un instant sur leur interprétation géométrique illustrée sur la Fig. 7.
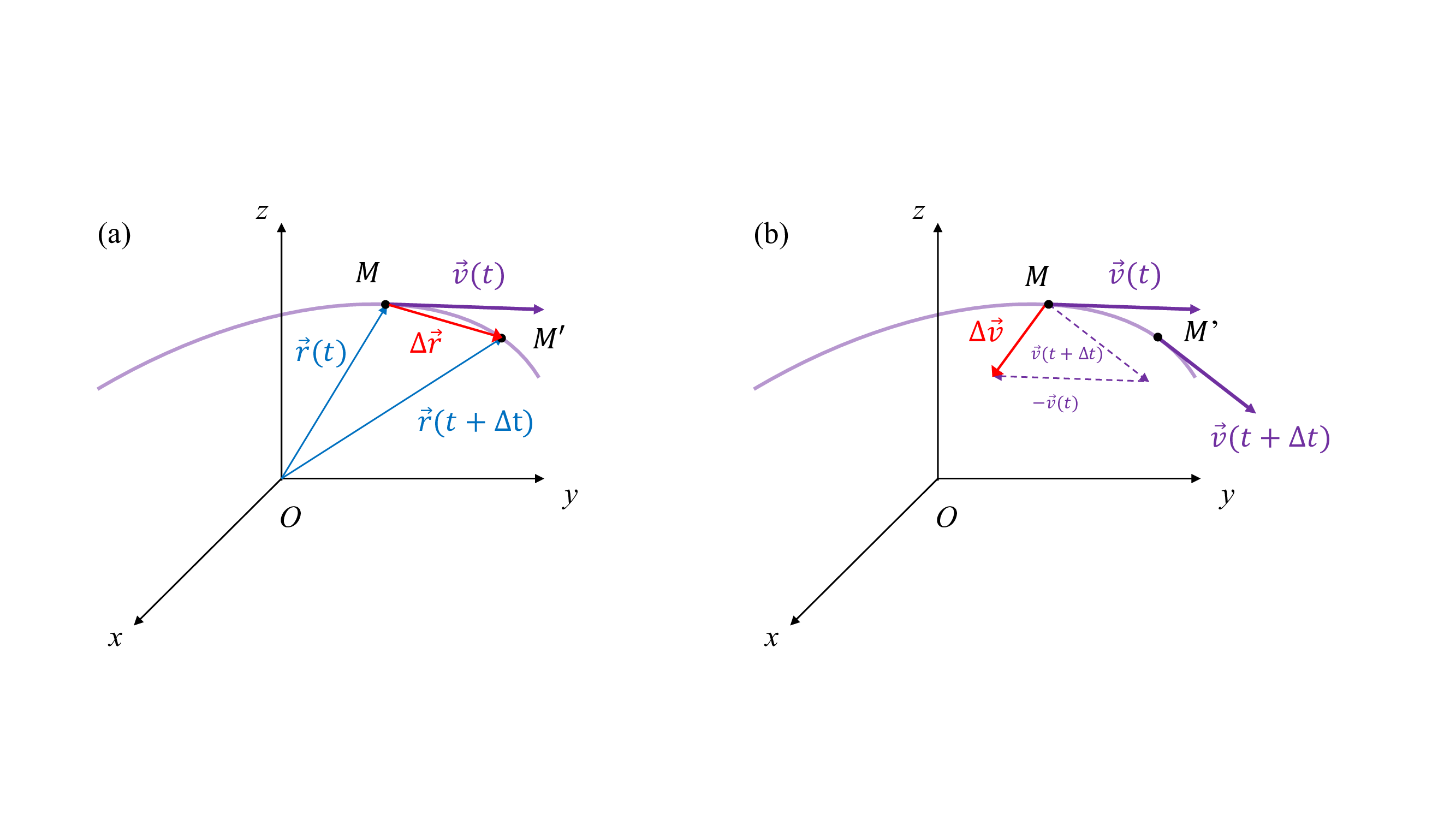
Fig. 7 Définition et interprétation géométrique des vecteurs vitesse (a) et accélération (b).
- Discutons tout d’abord le vecteur vitesse. On note \(M\) la
position à l’instant \(t\) du point mobile dont on suit la trajectoire, et \(M'\) sa position à un instant infiniment proche \(t+\Delta t\). Pendant l’intervalle de temps \(\Delta t\), le vecteur position varie d’une quantité infinitésimale \(\Delta \vec{r} = \vec{r}(t+\Delta t)-\vec{r}(t)\). Dans la limite \(\Delta t \to 0\), le point \(M'\) se rapproche de plus en plus du point \(M\) de telle sorte que \(\Delta \vec{r} \to \vec{0}\). Le rapport \(\Delta \vec{r} / \Delta t\) tend quant à lui vers une valeur finie qui définit le vecteur vitesse \(\vec{v}\):
\[\vec{v} = \lim_{\Delta t \to 0} \frac{\Delta \vec{r}}{\Delta t} = \frac{d \vec{r}}{d t} \ .\]Nous pouvons en particulier conclure que le vecteur vitesse est tangent à la trajectoire.
Un raisonnement similaire peut être développé pour le vecteur accélération. Pendant le même intervalle de temps \(\Delta t\), le vecteur vitesse varie de la quantité \(\Delta \vec{v}= \vec{v}(t+\Delta t) -\vec{v} (t)\), comme représenté sur la Fig. 7 (b). Dans la limite \(\Delta t \to 0\), le rapport \(\Delta \vec{v}/ \Delta t\) tend également vers une valeur finie :
\[\vec{a} = \lim_{\Delta t \to 0} \frac{\Delta \vec{v}}{\Delta t} = \frac{d \vec{v}}{d t} \ .\]La Fig. 7 (b) révèle également que le vecteur accélération est toujours orienté à l’intérieur de la concavité de la trajectoire.
Natures d’un mouvement
En pratique, on distingue trois types de mouvements :
les mouvements uniformes, pour lesquels la norme du vecteur vitesse est constante.
les mouvement accélérés, pour lesquels la vitesse augmente.
les mouvements décélérés, pour lesquels la vitesse diminue.
Mathématiquement, la norme du vecteur vitesse est donnée par :
de telle sorte que :
Cette dernière relation indique que le signe de la dérivée de la vitesse est le même que celui du produit scalaire \(\vec{a}\cdot\vec{v}\). Nous pouvons donc conclure que :
si \(\vec{a}\cdot\vec{v}=0\), alors le mouvement est uniforme.
si \(\vec{a}\cdot\vec{v}>0\), alors le mouvement est accéléré.
si \(\vec{a}\cdot\vec{v}<0\), alors le mouvement est décéléré.
Pour qu’un mouvement soit uniforme, il faut donc que l’une des conditions suivantes soit vérifiée : soit \(\vec{a}=\vec{0}\), auquel cas le mouvement est rectiligne, soit \(\vec{a} \perp \vec{v}\), ce qui correspond au mouvement circulaire que nous considérons dans la suite.
Mouvement circulaire
Nous discutons maintenant les mouvements dans le plan \(Oxy\) qui sont tels que : \(\Vert \vec{r} \Vert = R\), où \(R\) est une constante positive. Les trajectoires correspondantes sont des cercles de rayon \(R\), centrés à l’origine. Les mouvements circulaires ont joué un rôle essentiel dans le développement de la mécanique du point, de par leur importance pour l’étude des trajectoires planétaires.
Position et angle polaire
Dans le cas d’un mouvement circulaire, la position du point \(M\) est spécifiée de façon unique par l’angle orienté \(\varphi = (\widehat{\vec{e}_x,\vec{r}})\) — voir la Fig. 8. \(\varphi\) est appelé l’angle polaire. Les coordonnées du point \(M\) peuvent s’exprimer de la façon suivante :
Pour décrire le mouvement, on introduit deux nouveaux vecteurs unitaires : le vecteur \(\vec{e}_n=\vec{r}/R\) qui est normal (= perpendiculaire) à la trajectoire, et le vecteur \(\vec{e}_{t}\) qui est tangent à la trajectoire. Un peu de géométrie permet de déterminer les coordonnées de ces vecteurs dans la base cartésienne :
Contrairement aux vecteurs de la base cartésienne, qui sont fixes, les vecteurs \(\vec{e}_n\) et \(\vec{e}_{t}\) sont mobiles : leurs coordonnées évoluent au cours du temps à mesure que le point \(M\) se déplace.
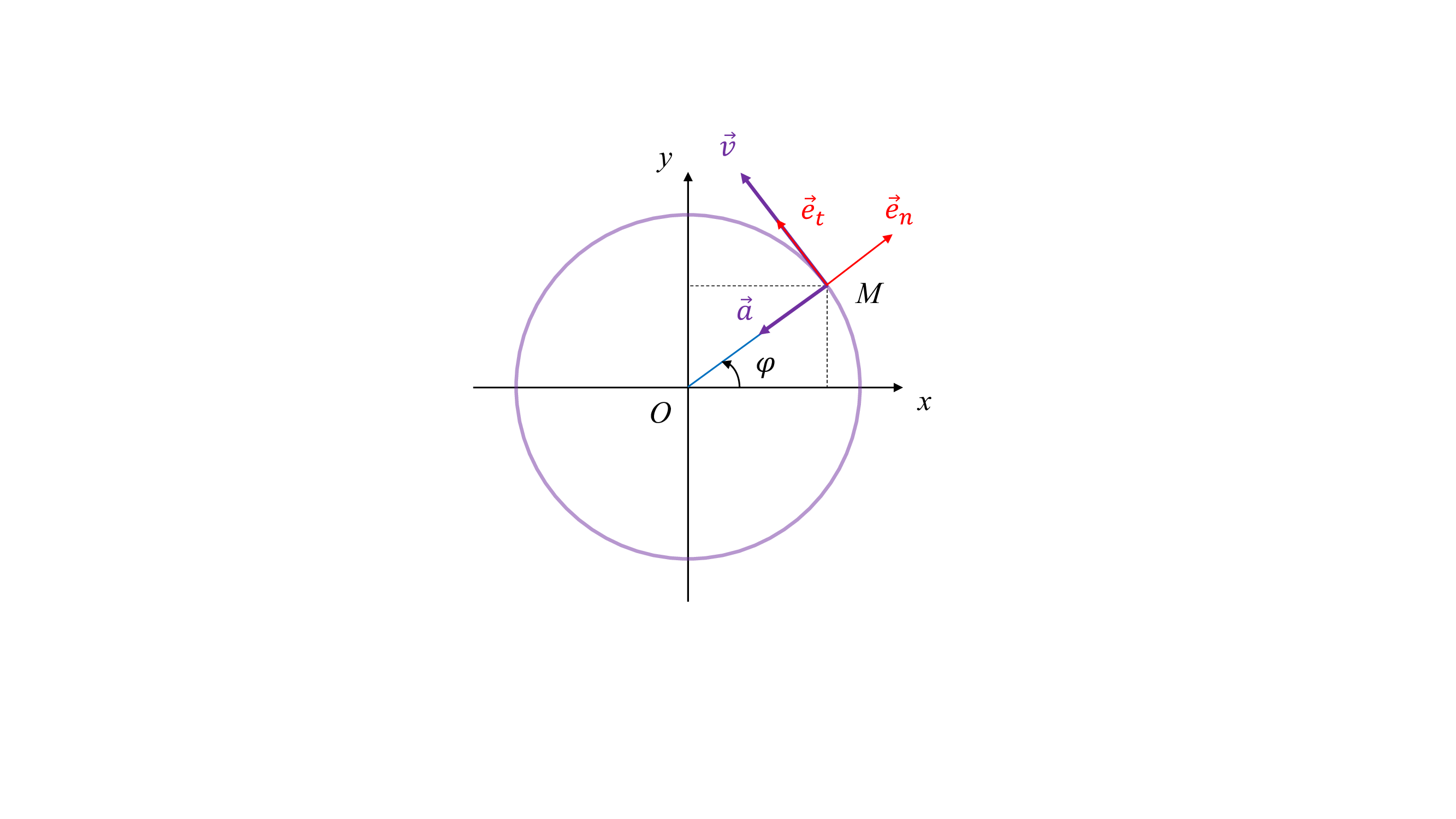
Fig. 8 Mouvement circulaire dans le plan \(Oxy\). Les vecteurs unitaires \(\vec{e}_n\) et \(\vec{e}_{t}\) sont respectivement normal et tangent au cercle de rayon \(R\). Sur ce schéma, le point \(M\) se déplace dans le sens trigonométrique.
Mouvement circulaire uniforme
Un cas particulier important est celui du mouvement circulaire uniforme : supposons que l’angle \(\varphi\) varie au cours du temps selon la loi \(\varphi(t) = \omega t\), où \(\omega>0\) est la vitesse angulaire. Dans ce cas, le point \(M\) revient à sa position de départ au bout d’un intervalle de temps \(T\) tel que [2] :
\(T\) est la période du mouvement, et \(\omega\) est aussi appelée la pulsation. L’unité SI de la pulsation est le \(\text{rad} \cdot \text{s}^{-1}\). On définit également la fréquence \(f=1/T\), qui s’exprime en Hz (ou en tours par minute). Fréquence et pulsation sont reliées par l’égalité :
La vitesse s’obtient alors en dérivant les coordonnées (Éq. (9)) du point \(M\) par rapport au temps, en tenant compte de la relation \(\varphi(t)=\omega t\) :
La norme \(v=\Vert \vec{v} \Vert\) du vecteur vitesse s’en déduit directement :
La norme de la vitesse étant constante, le mouvement est bien uniforme. En outre, si l’on compare l’équation (12) avec l’expression (10) des vecteurs unitaires, on peut encore écrire :
Autrement dit, le vecteur vitesse est tangent à la trajectoire.
En dérivant encore une fois par rapport au temps, on détermine les composantes du vecteur accélération :
La norme \(a=\Vert \vec{a} \Vert\) du vecteur accélération est alors donnée par :
On obtient donc une relation entre vitesse et accélération pour un mouvement circulaire uniforme :
Finalement, en comparant les expressions (13) avec les coordonnées (Éq: (10)) du vecteur \(\vec{e}_n\), on remarque que le vecteur accélération est perpendiculaire au cercle :
L’accélération étant dirigée vers l’intérieur du cercle, on dira qu’elle est centripète.

Fig. 9 Centrifugeuse du centre de recherche de la NASA en Californie.
Mouvement circulaire non uniforme
Reprenons le raisonnement précédent dans le cas général où la vitesse angulaire \(d \varphi / dt\) n’est pas constante. En dérivant les coordonnées (Éq. (9)) du vecteur position par rapport au temps, on obtient :
Ceci s’exprime encore dans la base locale \((\vec{e}_n,\vec{e}_{t})\) :
Bien entendu, on trouve que le vecteur vitesse est toujours tangent à la trajectoire. Si l’on dérive encore une fois l’équation (15), on obtient l’expression de l’accélération qui prend la forme suivante dans la base locale :
On voit donc que l’accélération a maintenant une composante tangentielle, qui est proportionnelle à l’accélération angulaire \(d^2 \varphi/ dt^2\). On peut encore écrire le résultat en fonction de \(v=\Vert \vec{v} \Vert\) :
Testez vos connaissances
Après avoir étudier ce chapitre, testez vos connaissances sur Wooclap
